- Notes to readers:
This paper provided a basic user's guide for
ACS staff members to Lynn Conway's MPM Architectural/RTL Timing
Simulator for the ACS-1 MPM (Main Processor Module).. The paper is of historical interest
because it reveals the scope of the ACS-1 simulation capability,
and because it also reveals details of the ACS-1's out-of-order
multiple instruction issuance (3 out of 8) dynamic instruction
scheduling subsystem running in action,via a detailed
simulation input/output example below.
-
- This page was created by scanning and
OCR'ing the original IBM-ACS internal paper. Page numbers correspond
to the original. See the following link for
a scanned PDF of the original paper.
(PDF)
-
- This paper has been officially declassified
by IBM, and Lynn Conway has been granted a
worldwide license
to distribute it for historical and academic purposes.
For background and context on this paper, refer to Lynn
Conway's ACS-Archive Front-Matter.
-
-
- IBM CONFIDENTIAL
-
- August 25, 1967
Advanced Computing Systems
Menlo Park
-
-
- MPM Timing Simulation
ACS AP #67-115
-
-
- Reference:
- 1. ACS AP #66-022, ACS Simulation Technique
2. ACS-1 MPM Instruction Manual
3. ACS AP #67-068, MPM-Instruction Sequencing
-
- To: File
-
- [signature]
-
- L. Conway
- LC:slb
-
-
-
- IBM CONFIDENTIAL
-
- CONTENTS
-
- 0-1 Introduction
- 1-1 The Unroller
- 2-1 The Timing Simulator
- 3-1 Current Job Running Procedures
- 4-1 Table of Implemented Instructions
- 5-1 Planned Modifications
-
-
- 0-1
IBM CONFIDENTIAL
-
-
- INTRODUCTION
-
- This memo describes the programs which perform MPM timing
simulation, It is primarily a "users manual" for these
programs.
-
- Two programs, the Unroller and the Timing Simulator, are
ran consecutively in order to time the MPM's execution of a user's
input program.
-
- The Unroller program accepts an ACS assembly language program
and control information concerning branch and skip execution,
and it unrolls" the program to produce a trace of the instructions
executed by the MPM when running the program. The trace is the
sequence of instructions along with their addresses, register
fields, and certain other information.
-
- The Timing Simulator then operates on the trace of instructions
executed by the MPM and produces timing charts indicating the
timing of the activities initiated by these instructions in the
various hardware components of the MPM.
-
- The following diagram illustrates the functions and relationships
of these two programs.
-

-
-
- In the following sections of the memo, these programs are
separately described with examples given illustrating preparation
of input and interpretation of output.
-
- The job running procedures for using the programs is described,
and the MPM ops currently implemented in the Timing Simulator
are listed.
-
- Since the programs are currently undergoing changes, the
current and planned changes are described to assist users in
their planning.
-
- Criticisms and suggestions from potential users are welcome
and will be helpful in making the Timing Simulator useful to
ACS.
-
-
- 1-1
- IBM CONFIDENTIAL
-
-
- THE UNROLLER PROGRAM (Prog. by J. Novicki, CSC)
-
- The Unroller program produces the input trace to the Timing
Simulator from an ACS assembly-code program plus control information.
-
- In the past an Execution Simulator, which performed a detailed
simulation of the execution of an input program, was used to
generate the instruction trace. It was found to be inconvenient
to use an execution simulator for this purpose because that requires
the accurate programming of all the tests and computations which
determine the desired path of execution through the program.
It often proved to be difficult and time consuming to write a
correctly executing program even though the path to be followed
was easily described.
-
- The Unroller program was written to solve this problem. Given
an ACS assembly language program, explicit indicators are placed
on the branch and skip instructions of the program to determine
the path of instruction execution. For example a branch op might
be followed by (3 BEGIN, *) to indicate that the first three
times the branch is executed it is successful with the branch
being to the instruction labelled BEGIN, and the fourth time
the branch is executed it is unsuccessful.
-
- This program and control information is processed by the
Unroller to yield the trace of instructions executed, which may
then be used as input to the Timing Simulator.
-
- Input Language, Card Input Format
-
- Input cards may contain a label, an op, code and operands.
The Branch and Skip instructions may contain additional control
information. A free' form format is used with no fixed starting
columns for each of these fields but with certain delimiter restrictions.
An asterisk In column I indicates a comment card.
-
- Label: A label can be up to 8 characters maximum and must
start with one of the characters A through Z or $. A label can
contain no imbeded blanks and must be terminated by a delimiting
colon.
-
- Op Code: An op, code can be up to 6 characters long with
no embedded blanks. It may be immediately followed by an asterisk
to indicate the Skip flag. At least one blank column must be
between the op code and its operand fields.
-
-
- 1-2
IBM CONFIDENTIAL
-
-
- Operands: The operand fields can contain information for
the i, j, k, and h fields of the instruction. Two fields must
be separated by a comma and a missing field will be indicated
by two consecutive commas. The first blank column terminates
the operand fields. The i, j, and k fields may be one of the
following formats:
-
- (i) Ldd
(ii) dd
-
- where "L" is the letter A for Arithmetic Register
or the letter X for Index Register or the letter C for Condition
Register or the letter S for Special Register. '"dd"
is a decimal number from 00 to 31 (leading 0 may be omitted).
The h field may contain a symbolic label or a decimal number
(up to 5 digits).
-
- Branch Parameters: A string of control parameters may be
listed after a branch instruction to determine the path of instruction
sequencing. The parameters indicate if the branch is successful
or unsuccessful for each time it is executed. The branch parameter
information must begin with a left parenthesis and end with a
right parenthesis and contains no imbedded blanks. Two parameters
in the list must be separated by a comma. The parameter format
is:
-
- (i) dL for a successful branch
(ii) d* for an unsuccessful branch
-
- where d is an optional digit indicating the number of times
the branch is successful or unsuccessful, L is the symbolic label
of the instruction branched to, and * is an indicator for an
unsuccessful branch. For example, if we have the instruction
-
- BEQ C1, C2, X4 (3ABC, *, XY)
-
- the program would be expanded to reflect the branch execution
as follows:
-
- (i) first three executions of branch are successful and branch
is to instruction labelled ABC
- (ii) fourth execution of branch is unsuccessful
(iii) fifth execution of branch is successful - to XY
-
- Skip Parameters: A string of control parameters may be listed
after a skip instruction to determine the effect of that instruction
on the sequence of skip states. The parameters indicate whether
the skip is taken or not, taken each time it is executed. The
parameter string
-
-
- 1-3
IBM CONFIDENTIAL
-
-
- has the same format as the branch parameter string with any
dummy label serving to indicate that the skip is taken, an *
indicating the skip is not taken. For example, if we have
-
- SKOR C1, C2 (2*, LABEL, *)
-
- the Unroller would set the skip state in the trace to reflect
the execution of the skip as follows:
-
- (i)first two times skip is executed it is not taken
- (ii) third time skip is executed it is taken
(iii) fourth time skip is executed it is not taken
-
-
- Output of Unroller
-
- Corresponding to the sequence of execution of the instructions
of the input program the Unroller produces the standard input
trace for the Timing Simulator: a card deck which is described
in detail in Section 2. One card is produced for each instruction
executed. The card contains the op, i, j, k, h fields, branch
and skip states, instruction and data reference addresses and
certain other fields.
-
- The Unroller also lists the input program and output trace.
Certain diagnostic messages may be listed:
-
- (i) Too many input cards (300 maximum)
(ii) Operand Field error
(iii) Error on following card (i. e. label information error)
(iv) Op code on next card not implemented
-
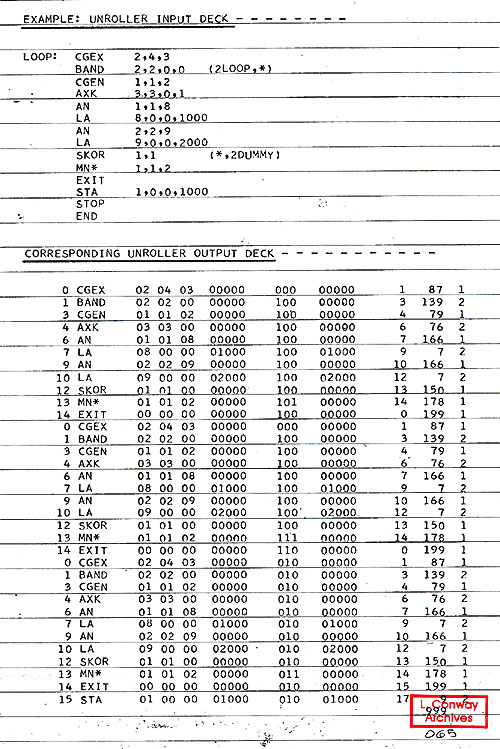
- Example: On the following page are the listings of a simple
input program deck and the trace deck produced by the Unroller
from that input deck. Note that the branch parameter list specifies
branch successful two times then branch unsuccessful. Thus we
make 3 passes through the loop. The branch and skip states in
the trace (see trace format Section 2) reflect the branch and
skip execution. Note: the OP "STOP" terminates unrolling,
and the pseudo op "END" marks the end of the unroller
input deck.
-
-
- 1-4
-
-
- 2-1
IBM CONFIDENTIAL
-
-
- THE TIMING SIMULATOR (Prog. by L. Conway, J. F. Parsons)
-
- For the purpose of MPM hardware or program evaluation we
may need detailed timing of the execution of a program by the
MPM. The MPM is sufficiently complex that hand-timing of all
but trivial programs is a very tedious process. The Timing Simulator
is a program written to perform this timing by simulating in
complete detail the hardware controls of the MPM.
-
- The Timing Simulator is written in FORTRAN IV (H) and runs
on a S/360 under OS, requiring an H level machine. The simulation
technique is similar to SIMSCRIPT but uses simpler utility routines
which are written in FORTRAN. Reference I provides a complete
description of the simulation technique.
-
- The level of hardware modelling performed by the Timer is
best described as being an "architectural" level. Individual
hardware triggers are included when they serve an individual
control function, but buses, registers, etc., are modelled as
logical entities rather than simulated to the bit level. Thus
the timer does not model the detailed engineering implementation
of the MPM. It does model all control algorithms in all sections
of the MPM, to accurately simulate the timing of instruction
execution by the MPM.
-
- The Timer currently operates on a MOD 75 at a rate of approximately
10 simulated machine cycles per second. Typical programs are
thus simulated at a rate of 20 inst./sec.
-
- A detailed description of either the Timing Simulator program
or the MPM model simulated is beyond the scope of this memo.
Users may assume that the program reflects the latest specification
of the MPM. This model is documented at an architectural level
in Reference 3 and other similar references soon to be issued.
Those who are familiar with the hardware design of the MPM and
have specific questions about the details of the simulation model
should contact the author.
-
- The remainder of this section on the Timer is concerned with
the practical problems of preparing input and interpreting the
output timing charts.
-
- The input to the timer is a "trace" of the instructions
actually executed by the program to be timed. The trace consists
of the sequence of instructions executed along with certain control
information. This input is prepared by running an ACS assembly
code program through the Unroller program (see Section 1).
-
-
- 2-2
IBM CONFIDENTIAL
-
-
- Certain job controlling cards including a specification of
the hardware parameters for the run are added to the trace deck
to form the input deck.
-
- The output of the Timer is a series of timing charts which
illustrate the activities initiated by the instructions of the
input program trace in the various hardware components of the
MPM as a function of time.
-
- A detailed description of the input and output formats and
output interpretation is given on the following pages. Examples
are given which follow the paths of individual instructions through
the various sections of the MPM as a function of time.
-
-
- Timing Simulator Input Preparation
-
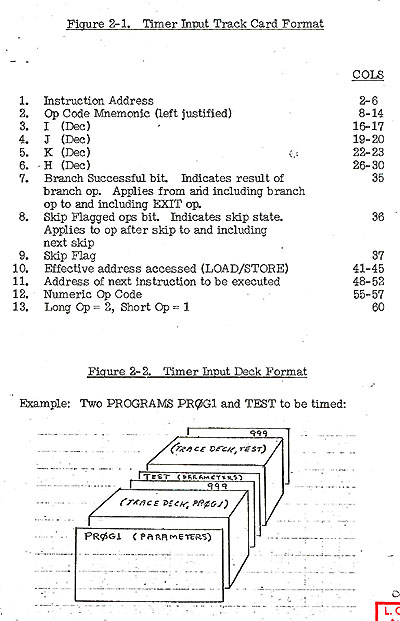
- Input Trace Cards: The Unroller program is used to produce
the input trace card decks for the Timing Simulator. An ACS assembly
code program is run on the Unroller and a trace deck is produced
as output. Refer to Section 1 for information on this program.
The trace deck produced by the Unroller is an instruction by
instruction record of those instructions actually executed by
the program to be timed. Each instruction of the trace is present
on a separate card. The format of these cards is specified in
Fig. 2-1.
-
- Timer Input Deck Format: Each program to be timed is formed
into one deck beginning with a machine parameter card, followed
by the trace cards for the program, and ending with a card containing
999 in cols 55, 56, 57 (a "STOP" card). A number of
such input decks may be stacked and timed during one execution
of the Timer. An example of this stacked job deck structure is
illustrated in Fig. 2- 2.
-
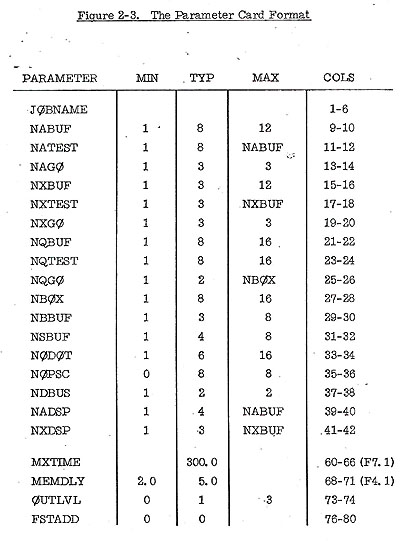
- Parameter Card: The first card of each input program deck
is a parameter card which specifies certain MPM hardware parameter
values and certain parameters for the running of the job (maximum
simulated time, etc.). These parameters are the following:
-
- JOBNAME: Up to six characters identifying program
-
- NABUF, NATEST, NAGO: The number of A Buffers, the number
tested each cycle for OP issuance, the maximum number of OP which
may be issued for execution each cycle from the A Buffers (A
Contending Stack).
-
- NXBUF, NXTEST, NXGO: Similarly for X unit Contending Stack.
-
-
- 2-3
IBM CONFIDENTIAL
-
-
- NQBUF, NQTEST, NQGO: Similarly for Data Memory Queue.
-
- NBOX: Number of memory boms.
-
- NBBUF, NSBUF: Number of Exit History Table positions, number
of Skip Table positions.
-
- NODOT: Number of DO Table positions.
-
- NOPSC: Number of PSC registers.
-
- NDBUS: Number of Dispatcher Buses.
-
- NADSP: Maximum number of OPS which maybe dispatched to the
A Buffer per cycle.
-
- NXDSP: Similarly for X dispatching.
-
- MXTIME: Run control parameter. Maximum simulated time allowed
for run (in machine cycles). Run terminated if this time is exceeded.
-
- MEMDLY: Memory Delay Time. See example of arithmetic load
G7 on page 2-13 for exact definition.
-
- OUTLVL: One of four output levels maybe chosen. Level 0 is
most detailed, Level 3 is least detailed (and fastest cunning).
Level 1 is normally used and is level shown in the examples at
the end of this section.
-
- FSTADD: Starting address of the input program.
-
- Fig. 2-3 specifies the format of the parameter card. Minimum,
typical,
and maximum values of the parameters are given. The TYP values
represent the "most likely" values of the hardware
parameters.
-
- There are other machine parameters not controlled by the
parameter card which may be easily varied by changing certain
initialization tables in the Timer. An example of this is the
busing and facility characteristics in the A and X execution
units; These structures are listed in the output for each run
(see output portion of this section). If changes in these machine
parameters are desired for a particular timing study, contact
the author.
-
-
- 2-4
-
-
- 2-5
-
-
- 2-6
IBM CONFIDENTIAL
-
-
- Timing Simulator Output Interpretation
-
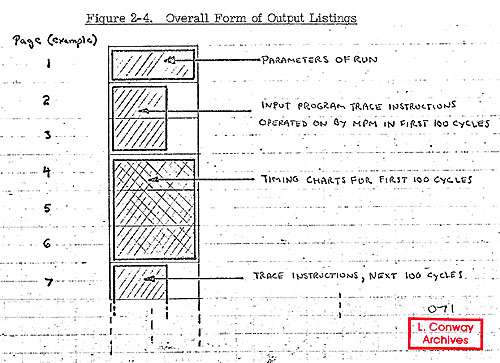
- For each input job, a deck headed by a parameter card and
terminated by a 999 card, an output listing is produced of the
following form:
-
- (i) The first page lists the job name and all parameters
of the run including the busing and facility structure.
-
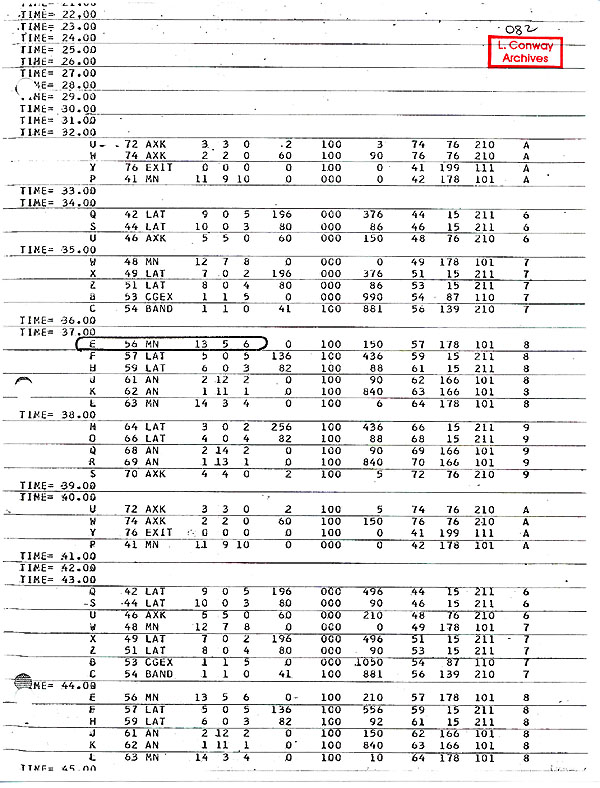
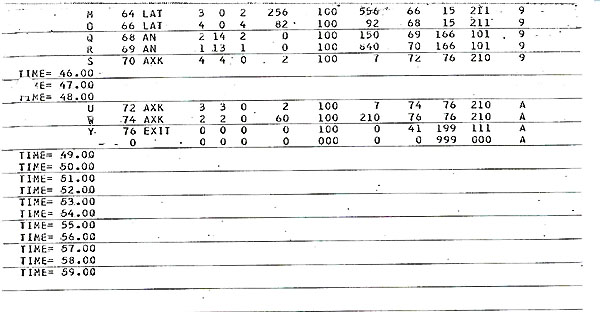
- (ii) This is followed by a listing of those input trace instructions
operated upon by the MPM during the first 100 simulated cycles
of time.
-
- (iii) This is followed by a listing of timing charts indicating
the activities initiated by those instructions of (ii) during
the first 100 simulated cycles.
-
- (iv) Items (ii) and (iii) are repeated for successive 100
cycle periods till the run stops or is terminated by MXTIME.
-
-
-
- 2-7
IBM CONFIDENTIAL
-
-
- We will now examine the general characteristics of these
three components of the output. A sample output listing is included
at the end of the section for reference while studying these
general descriptions.
-
- Some specific examples will then be developed which illustrate
the progression of instruction activity through the different
sections of the MPM. These examples are referenced by markers
on the sample output listings.
-
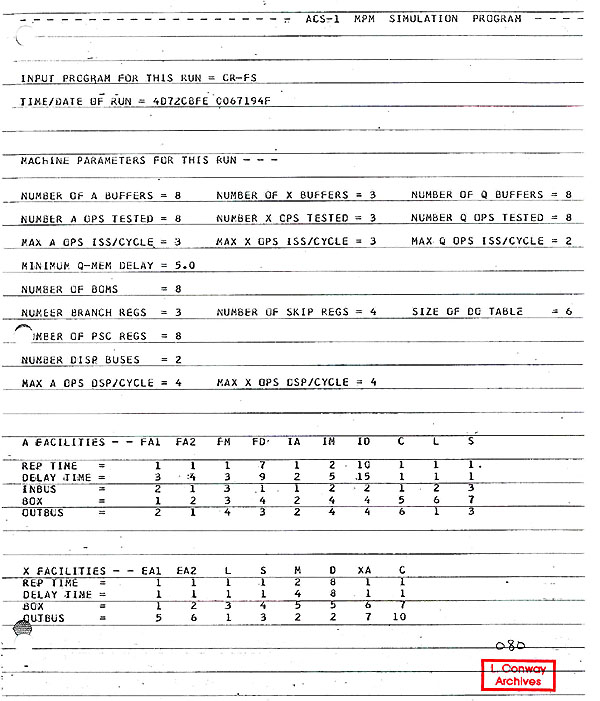
- Parameters of Run: This page lists the job name, date and
time of run, and the MPM hardware parameters for the run. Many
of these parameters are those specified on the input parameter
card, described earlier in this section. The A and X unit busing
and facility structures are printed for reference in a table
with the following entries:
-
- 1. The abbreviated name of the facility (FA1 = floating adder
1).
- 2. The Rep Time of the facility - the number of cycles an
operation keeps the facility busy.
- 3. The Delay Time of the facility - the number of cycles
the facility requires to perform operation.
- 4. INBUS - the numbers assigned indicate which facilities
share a common inbus.
- 5. BOX - the numbers assigned show which facilities share
circuitry and cannot be simultaneously busy.
- 6. OUTBUS - the numbers indicate which facilities share a
common outbus.
-
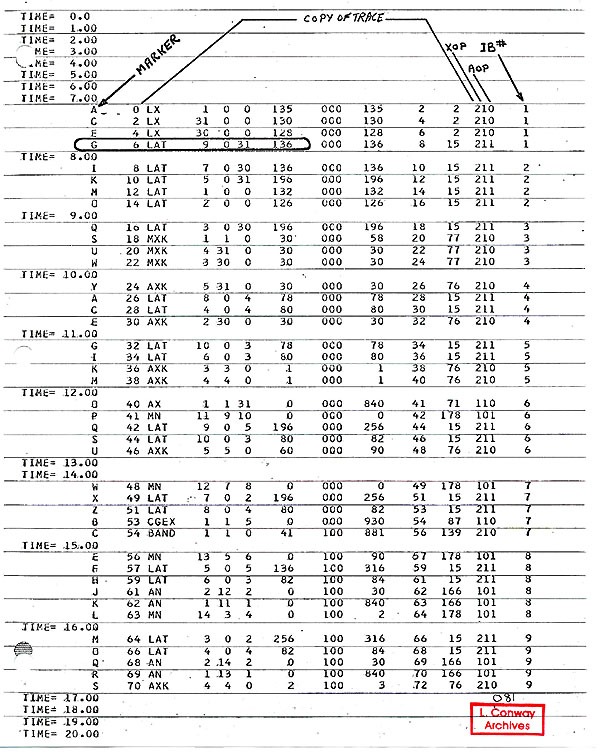
- Input Program Trace: For each block of 100 cycles of simulated
time the Timer prints the instructions of the input trace which
have been operated upon by the MPM during that time. This is
used to reference the timing charts for that period of time.
The input program trace printed is a copy of the input cards
with five fields added:
-
- (i) Time markers are placed indicating the time (approx.)
that the instruction entered an IB.
-
- (ii) A letter is assigned to each instruction by decoding
the instruction address MOD 26. This letter is then used as the
marker for that instruction in the timing charts.
-
-
- 2-8
IBM CONFIDENTIAL
-
-
- (iii), (iv) Bits are set indicating whether the op is to
be dispatched to the A unit, X unit or both.
-
- (v) The number of the IB into which the instruction was fetched..
This along with (i) will locate the instruction marker's first
appearance on the timing charts (in a dispatch register).
-
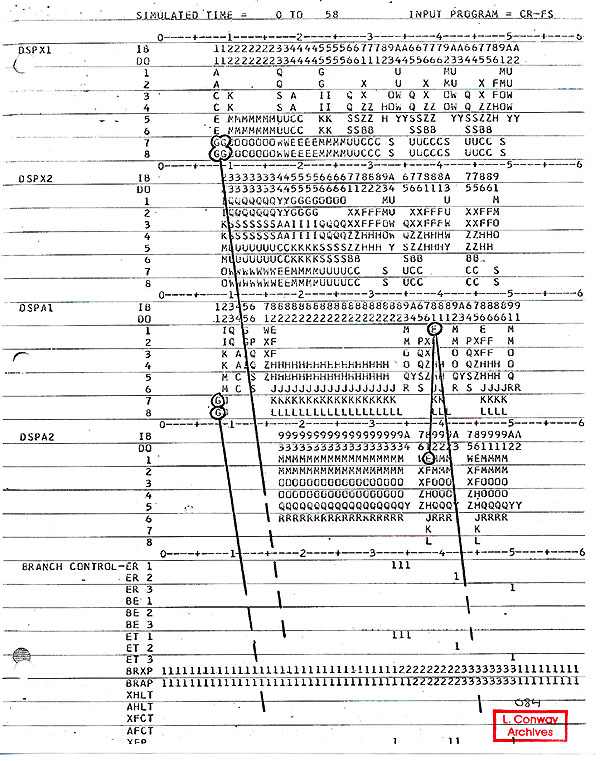
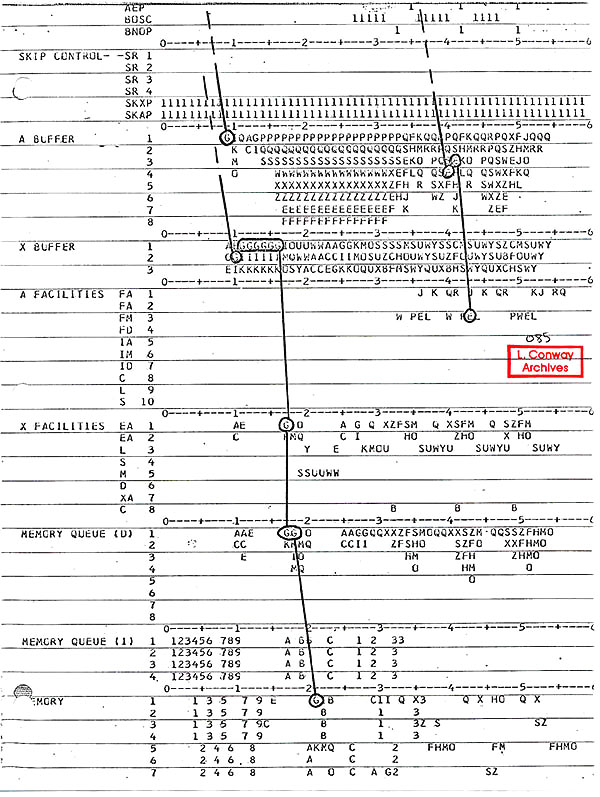
- The Timing Charts: A set of timing charts are produced for
each 100 cycle period of simulated time. The general form of
these charts is as follows:
-
-
- The time axis has markers every cycle and number indicating
10, 20, ..., 90 cycle points in the 100 cycle period. The time
of the period is listed at the top of the page (ex.: SIMULATED
TIME = 300 TO 399).
-
- The machine facilities included in the timing charts are
identified as follows:
-
- DSPX1, DSPX2, DSPA1 , DSPA2: These are the dispatch registers
X1, X2, Al, A2. The IB number and DO table entry are listed which
correspond to the contents of the dispatch register. The eight
24-bit instruction fields are shown for each register with markers
indicating which instructions of the input trace are currently
present.
-
- BRANCH CONTROLS: These are hardware triggers controlling
the branching process. ER1, ER2, ER3, BE1, BE2, BE3, ET1, ET2.
ET3 are the exit resolved, branch executed, and exit taken entries
in the Exit History Table (EHT). BRXP, BRAP are the X and A pointers
to the EHT. The description of the other listed controls is beyond
the scope of this introductory memo.
-
- SKIP CONTROLS: Skip state triggers with SKXP, SKAP, the X
and A unit pointers to the triggers.
-
-
- 2-9
IBM CONFIDENTIAL
-
-
- A BUFFER, X BUFFER: These are the A and X unit contender
stacks where ops are tested for interlocks before issuance to
the functional units. This is the point where ops may be issued
out of order if the appropriate interlocks are satisfied. The
instruction occupancy of the buffer positions is indicated by
markers.
-
- A FACILITIES, X FACILITIES: These are the various functional
units such as adders, multipliers, shifters, logic units, etc.
-
- The instruction markers are placed in a facility position
for that period of time during which the instruction actually
has the facility busy for interlocking purposes. Note that an
op keeps a facility busy for a number of cycles equal to the
REP TIME of that facility.
-
- MEMORY QUEUE (D): The data memory queue. This is the queue
which holds data loads and stores after issuance from the contender
stacks and before issuance to memory. This queue roughly approximates
the timing effects of the BLCU with no paging activity. If appropriate
interlocks are satisfied the requests may go out of order. An
instruction is indicated by its marker.
-
- MEMORY QUEUE (I): Instruction fetch memory queue. This queue
holds the instruction fetch requests prior to issuance to memory.
The markers are the IB destination number of the fetch. Four
markers are placed corresponding to the four pieces of one request.
When all have been issued a new set may enter.
-
- MEMORY: Here we can observe the relative timing of loads,
stores and instruction fetches as their markers indicate busy
memory BOMS. The marker for an instruction is placed on the second
of the two cycles that the op is activating the BOM--noting that
the memory BOM REP TIME is one cycle.
-
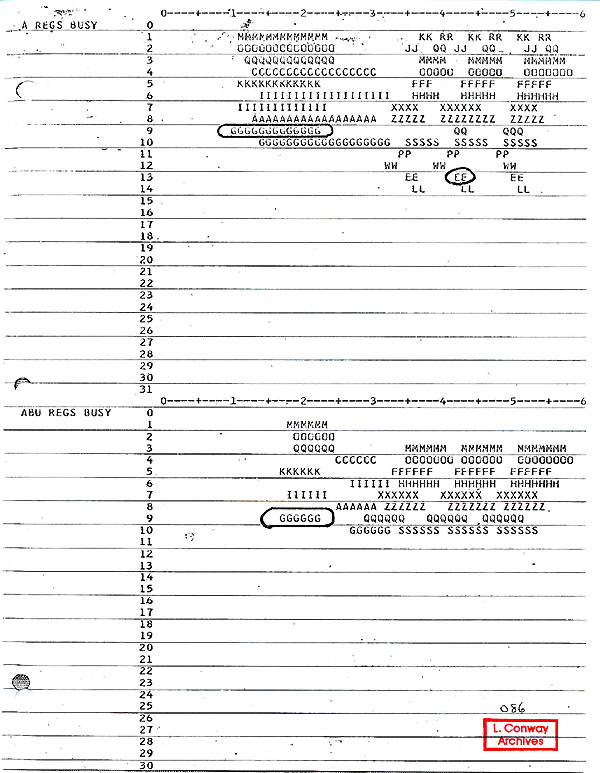
- A REGS BUSY: When an OP is issued from the A contender stack
to a functional unit, the A destination register of the OP is
marked busy with the OP marker. This is used to interlock the
issuance of other OPS in the contender stack (which use that
destination register) until the result arrives at the register
( or is available for bypassing to the input of another facility).
-
-
- 2-10
IBM CONFIDENTIAL
-
-
- ABU REGS BUSY: The A Back-Up Registers are the destination
registers for A loads and X to A moves (instructions issued from
the X unit contender stack). At the time of issuance the op marker
is placed in the ABU REGS BUSY position corresponding to the
op destination and remains till the load or move is completed.
-
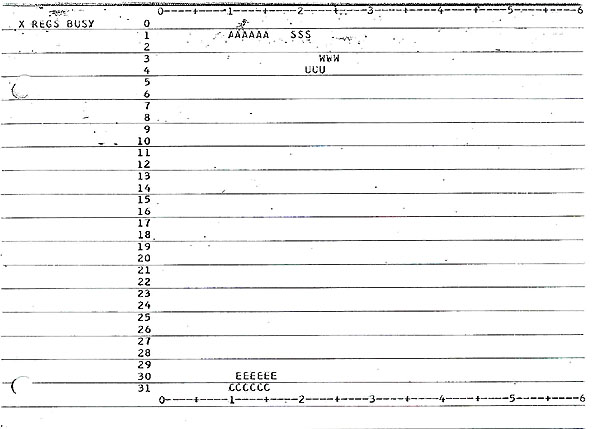
- X REGS BUSY: The busy bits for the X Registers, similar to
the A REGS BUSY described above.
-
-
- Example of Timing Simulator Output
-
- At the end of this section is a copy of the output listing
for a typical run of the Timing Simulator. The parameter page
is followed by 3 pages listing the input trace for the first
100 cycle period of time. Then 4 pages are listed containing
the timing charts for the first 100 cycles.
-
- The program being timed is a version of Crout Reduction.
In this case the MPM is active for only 58 simulated machine
cycles--a starting transient is followed by three passes through
the inner loop of the program.
-
- The interpretation of the timing charts can be somewhat complex.
In this memo only a few simple illustrative examples are given
which follow the paths of certain instructions of the sample
program through the various sections of the machine.
-
- A thorough knowledge of the MPM hardware controls and considerable
practice are necessary for a complete interpretation of the timing
charts. However, certain subsets of the charts maybe studied
with a detailed knowledge of only that section of the MPM. For
example, someone interested in compiler scheduling of instructions
could focus his attention on the performance of his input programs
in the A and X BUFFERS and A and X FACILITIES, observing the
effects of various schedulings on the timing through these units.
A knowledge of the interlocking rules of the contender stacks
and of the busing and facility structure would be sufficient
to get a start at this.
-
- Certain simple observations may yield useful measures of
MPM performance on the input program. The overall time of the
run is easily determined. It is given as the upper time limit
on the last set of pages listing timing charts for the run. In
our example this overall run time is 58 cycles. Another measure
which is often useful is the time taken to execute a program
loop. If the input program is of the type
-
-
- 2-11
IBM CONFIDENTIAL
-
-
- which repetitively executes a loop, the loop pattern will
be obvious in the A and X FACILITY busy markers on the timing
charts. This is because a given op has the same marker symbol
each time the loop is executed (the marker is determined by the
instruction address). Thus the loop time is found by measuring
from marker to similar marker in the A FACILITIES for example.
In our sample output we find that the MPM executes the program
loop 3 times in the, FLOATING MULTIPLIER between cycle 33 and
cycle 52. The pattern has not yet settled down to a repetitive
one in the example, but the loop time is seen to be approximately
8 cycles.
-
- Some detailed examples follow. Refer to the sample listings
at the end of this section.
-
- Instruction Fetching: At time = 1 an instruction fetch
request to fill IB(1) has been placed on the MEMORY QUEUE (1).
It is issued to MEMORY in the next cycle and (after some busing
time) we observe at time = 4 that MEMORY BOMS 1, 2, 3, 4 are
busy servicing this request. The fetched instruction is then
bused to IB(1) (not indicated in output). At time = 8 we observe
that DSPX1 and DSPA1 have been loaded from IB(1). The instructions
which were fetched are seen to be A, C, E, G, which are X OPS
and in DSPX1, and G which is an A OP and in DSPA1.
-
- Notice that instruction fetching occurs up to time = 33.
After this time the loop has been contained in the IB's and no
further instruction fetching is required to run the problem.
-
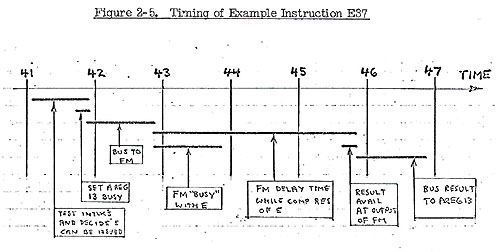
- Multiply Instruction E37: At time = 37 we find the
instruction MN 13, 5, 6, which is marked by an "E",
in the instruction trace section of the output.
-
- Let us follow the activity of this instruction through the
MPM. We observe from the trace that E was fetched into IB(8).
At time = 38 we notice that IB(8) >DSPA2 and we find E in
DSPA2(1). At time = 38 only two positions are free in the A BUFFER
so the OPS X and Y in DSPA1 move to the A BUFFER at time = 39
but E remains in the dispatchers, moving up to DSPA1(l).
-
- At time = 39, the A BUFFER has two free positions so at time
= 40 instruction E along with F are bused to the A BUFFER. We
find E in A BUFFER (4) at a time = 40.
-
-
- 2-12
IBM CONFIDENTIAL
-
-
- Now at time = 40 another multiply instruction, P, is present
in the A BUFFER and ahead of E. This multiply, interlocking E,
is issued the next cycle while E remains present at time = 41
in A BUFFER (3). At this time there are no ops ahead of it in
the buffer which interlock it so it is issued for execution and
is not present in A BUFFER at time 42. Notice that A REG BUSY
(13) goes on with the marker E at time = 42 to interlock any
OPS following E which -use A REG (13) as a source or destination.
-
- The multiplier FM under A FACILITIES is found busy with E
at cycle time = 43 (one cycle of busing required from A BUFFER
to A FACILITIES). Then at time = 44 the A REG BUSY (13) is no
longer marked by E indicating that the result of E will be available
(for bypassing) at the output of the multiplier at cycle time
= 46. Note that the delay time of the FM is 3 cycles, the multiply
E taking cycles 43, 44, 45, with the result actually back at
register 13 at cycle 47. But the multiplier is only "busy"
with E for one cycle (the REP TIME of FM) so the multiplier could
handle a new op every cycle. The timing of the busing and multiplication
are illustrated in Fig. 2-5, for the specific example instruction
E37.
-
-
-
-
- 2-13
IBM CONFIDENTIAL
-
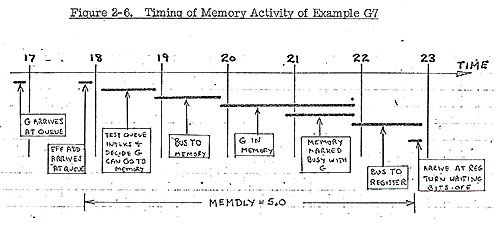
- Arithmetic Load Instruction G7: At time = 7 we find
the instruction LAT 9, 0, 31, 136 which is marked by a "G",
in the instruction trace section of the output. We observe from
the trace that G was fetched into IB(1). It is both an AOP and
an XOP and will be dispatched to both units.
-
- At time = 8, we observe from the timing charts that IB(1)
> DSPX1, IBM > DSPA1. At that time G is present in DSPX1(7),
DSPX1(8), and in DSPA1(7), DSPA1(8). G is a long OP and takes
two of the 24-bit positions in the dispatchers.
-
- Let us follow the A unit activity of G first. We note that
at time = 8 G is the first AOP to enter the dispatchers and thus
it is bused to the A BUFFER the next cycle. At time = 9 we find
G in A BUFFER (1). This part of G is a "replace" operation
and is issued the next cycle, causing A REG BUSY (9) (the destination
of the load) to be marked busy with a G at time = 10. This sets
the "front" register busy waiting for the "back-up"
register to be loaded by the X-unit.
-
- Now let us follow the X unit activity of G. Since three other
X OPS precede G in DSPX1 at time = 8, and at most 3 ops may be
dispatched to the X BUFFER per cycle, G remains in DSPX1 at time
= 9. At time = 10 it is bused to X BUFFER (2), for it is the
next op to be dispatched to the X BUFFER and both A and C leave
the X BUFFER at time = 10 allowing G to enter.
-
- We now find that G remains in the X BUFFER through time =
16. This is because it uses X REG (31) as an index and X REG
(31) is busy through time = 15 waiting for a load to arrive.
-
- At time = 16 G finally satisfies the contender stack interlocks
and at time = 17 its execution is initiated by (i) starting effective
address computation in X FACILITY EA1, (ii) placing an entry
in the MEMORY QUEUE (D), (iii) marking the ABU REG BUSY (9) with
G. The queue entry waits on the queue another cycle for the effective
address to arrive, and then is issued to memory. We note that
at time = 21, MEMORY (1) is marked busy with G, and at time =
23 the busy. bits on ABU (9) and A(9) are turned off indicating
that the load has arrived at ABU (9) and then moved immediately
to the waiting A(9).
-
- The detailed timing of this memory activity is illustrated
in Fig. 2-6.
-
- 2-14
-
-
- 2-15 (MPM timing simulator
input for CR-FS):
-
- 2-16
-
- 2-17
-
- 2-18
-
- 2-19 (MPM timing simulator output for input CR-FS):
-
- 2-20
-
- 2-21
-
- 2-22
-
-
- 3-1
IBM CONFIDENTIAL
-
-
- CURRENT JOB RUNNING PROCEDURES
-
- This section describes the procedures to be followed in order
to use the timing simulation program. These procedures are to
be completely revised and expanded in the near future so that
the programs may be stored on disk at the MOD 75 comp lab and
users may submit runs directly at the comp lab (see Section 5).
-
- To use the timing simulator at the present time:
-
- (i) Write the assembly code input program for the Unroller
(Section 1).
- (ii) Prepare the machine parameter card required for the
Timer input deck (Section 2).
- (iii) Submit these items to L. Conway, Room 203, Extension
252.
-
-
- 4-1
IBM CONFIDENTIAL
-
-
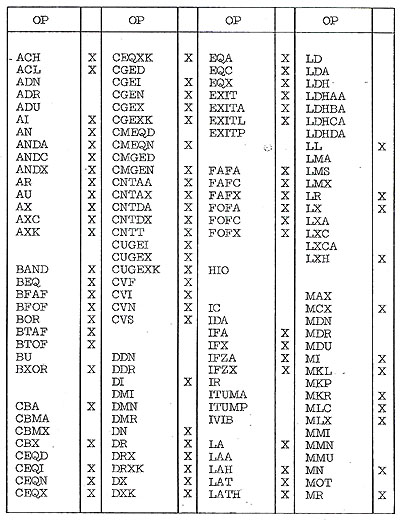
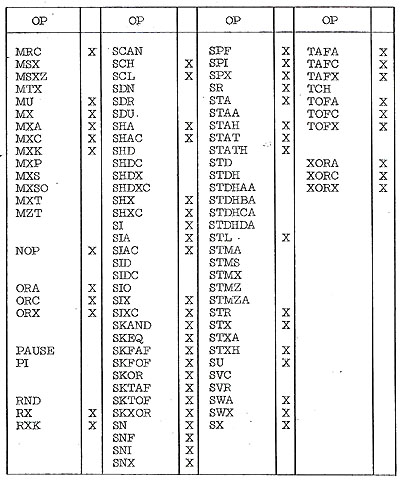
- TABLE OF IMPLEMENTED INSTRUCTIONS
-
- The table on the following pages lists the ACS-1 instruction
set op codes and indicates (with an X) if a given op is implemented
in the Timing Simulator.
-
-
- 4-2
-
-
- 4-3
-
-
- 5-1
IBM CONFIDENTIAL
-
-
- PLANNED MODIFICATIONS
-
- Certain modifications to the simulation programs are now
being made or are planned for the near future. These are briefly
described below to assist users in their planning. Updates to
this memo will. be issued as these changes are included in the
programs.
-
- Unroller Changes
-
- The control specification facilities will be extended.
-
-
- Timing Simulator Changes
-
- (ii) Additional OPS will be implemented.
(ii) New output features and options will be added.
-
-
- Job Running Procedure Changes
-
- Currently jobs must be submitted to L. Conway who will handle
the processing of the jobs. Two separate programs must be run
consecutively to process one timing simulation. This results
in a rather long overall turn-around time. To improve on this,
the two programs will be merged, with the trace temporarily stored
in core or on disk and automatically passed between them.
-
- Also, the program will be placed on disk at the MOD 75 comp
lab. The running of jobs will then be handled directly by the
user, who will submit the assembly code input deck, parameter
card, and appropriate JCL cards to call for the timing simulator.
-
- These changes will greatly reduce overall turn-around time
and allow a much greater number of users to be served than is
now possible.
-
-
lynnconway.com >
ACS Archive front-matter > IBM-ACS
MPM Timing Simulator